
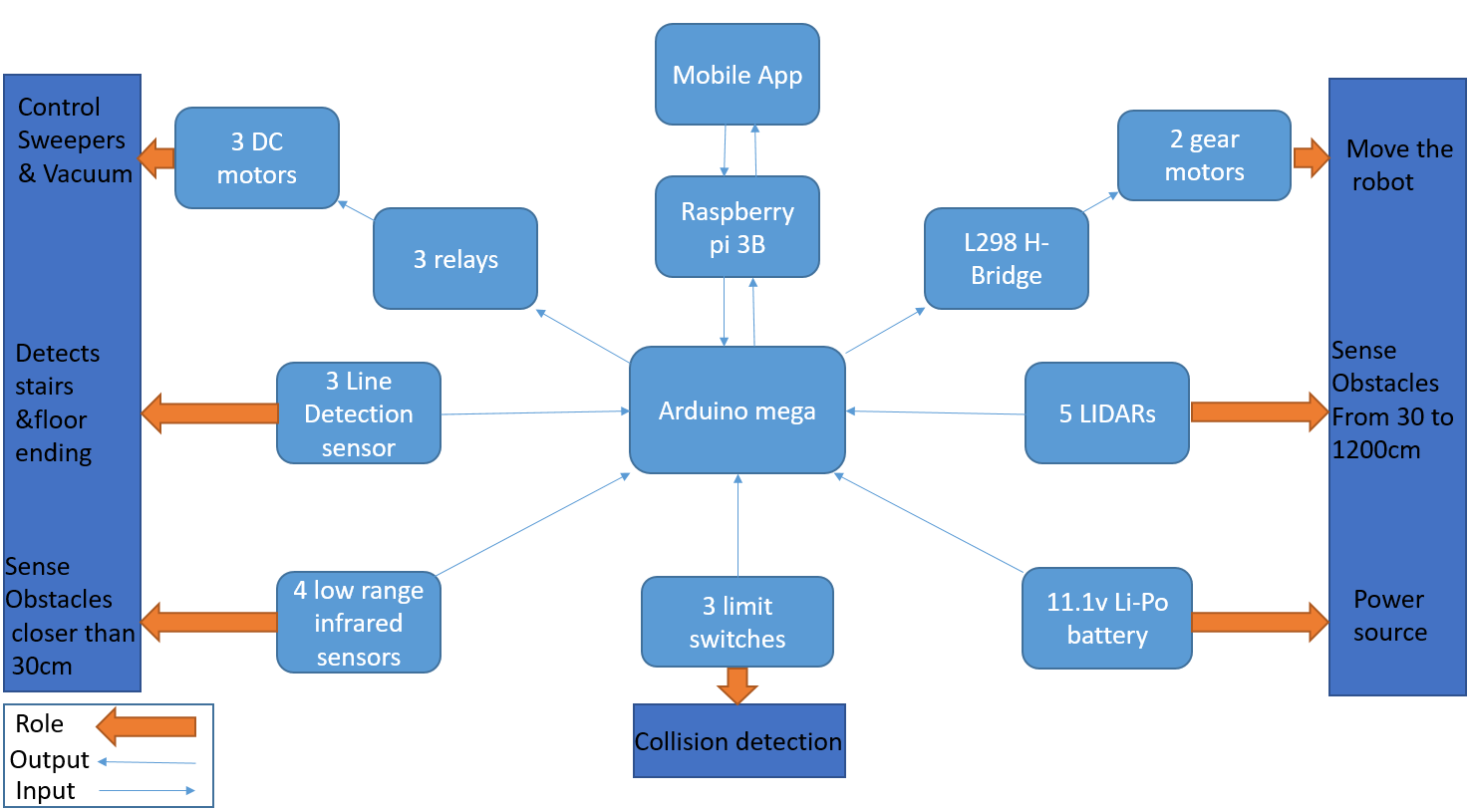

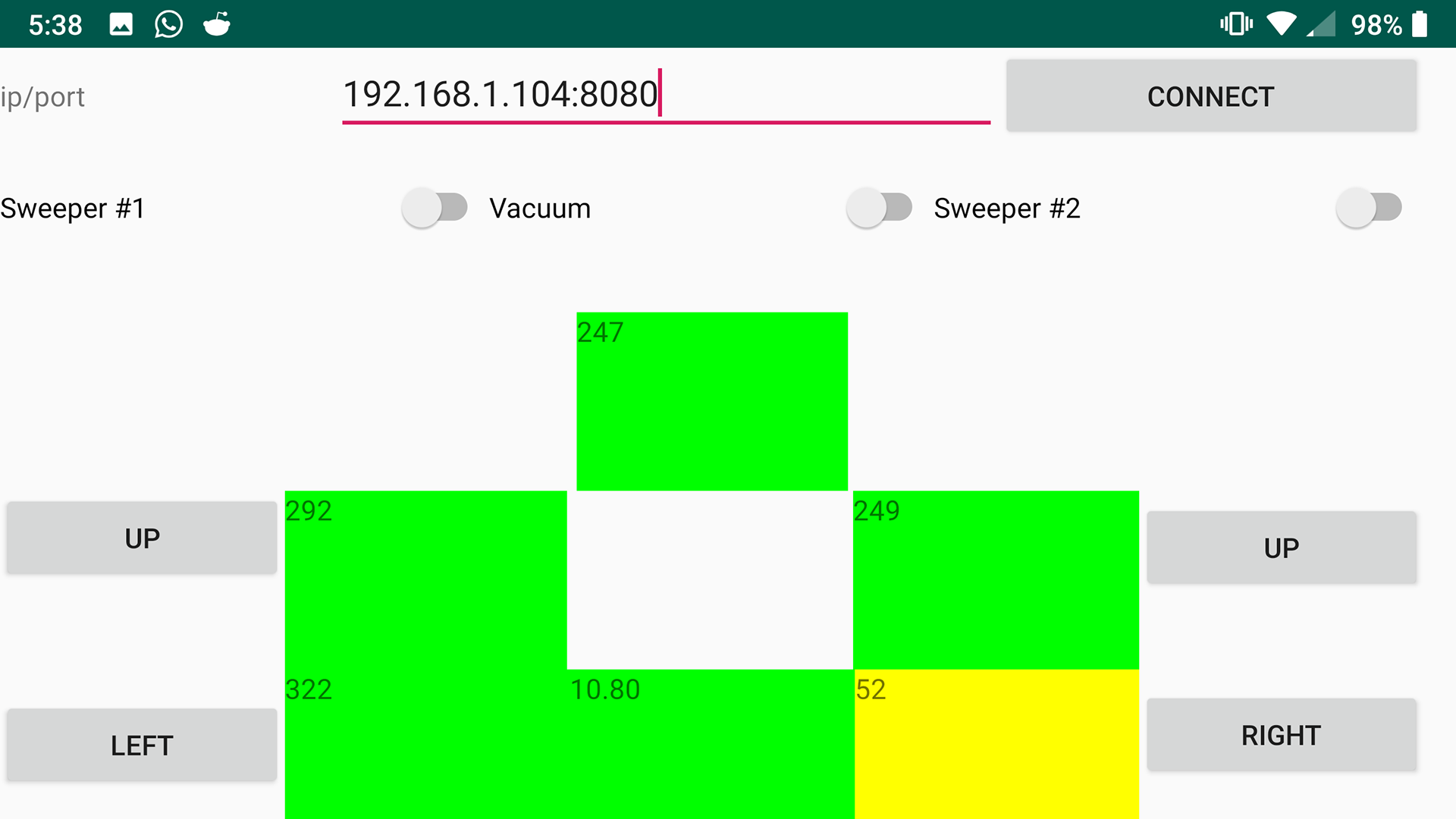
This project is an autonomous cleaning robot that is using re-enforcement learning ML algorithm to train itself on runtime, using more than 15 sensons between lidars, infrared short range sensors, infrared lond range sensors and limit switches. besides the autonomous driving mode this roubot can be controlled manually using RDP or the android application over local network.