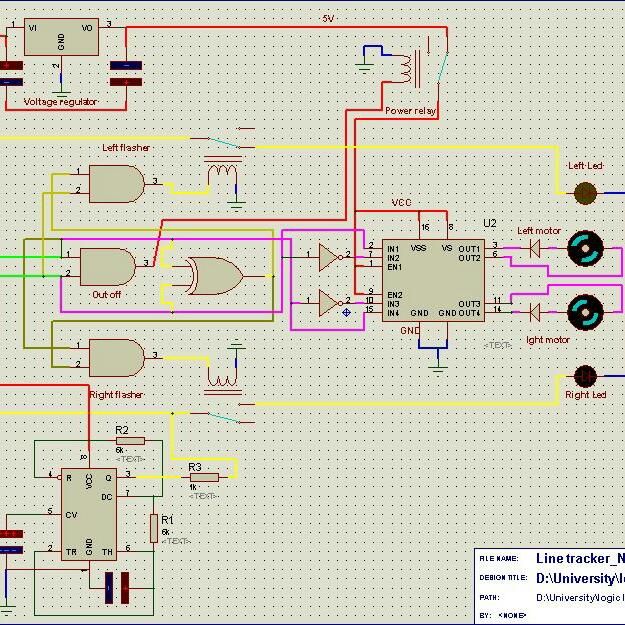
This marked one of my initial ventures into university-level electronics projects. I developed a line-tracking robot employing digital logic design, eschewing microcontrollers. The project featured a 7-segment display for lap counting, alongside another display for configuring the desired number of laps for the robot to halt.