
This work introduces a robot software architecture leveraging the notions of digital twin and mixed reality to enhance human-robot collaboration.
The architecture:
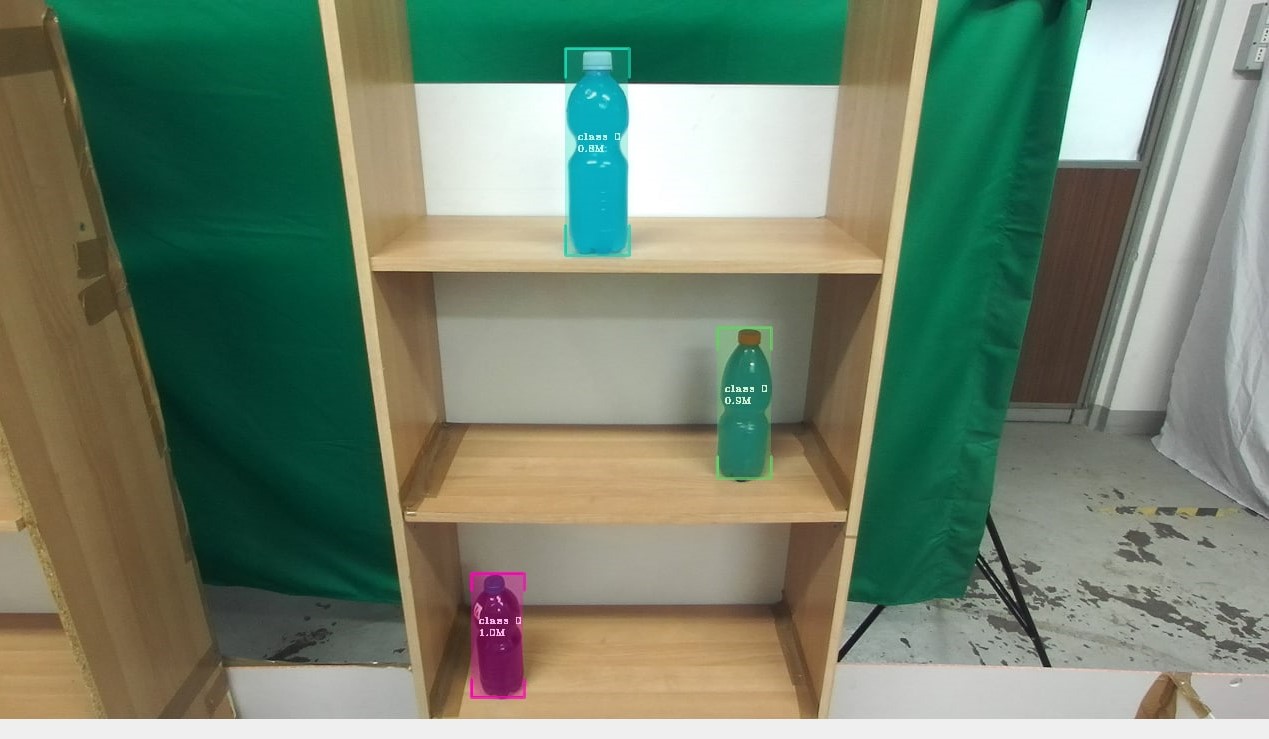
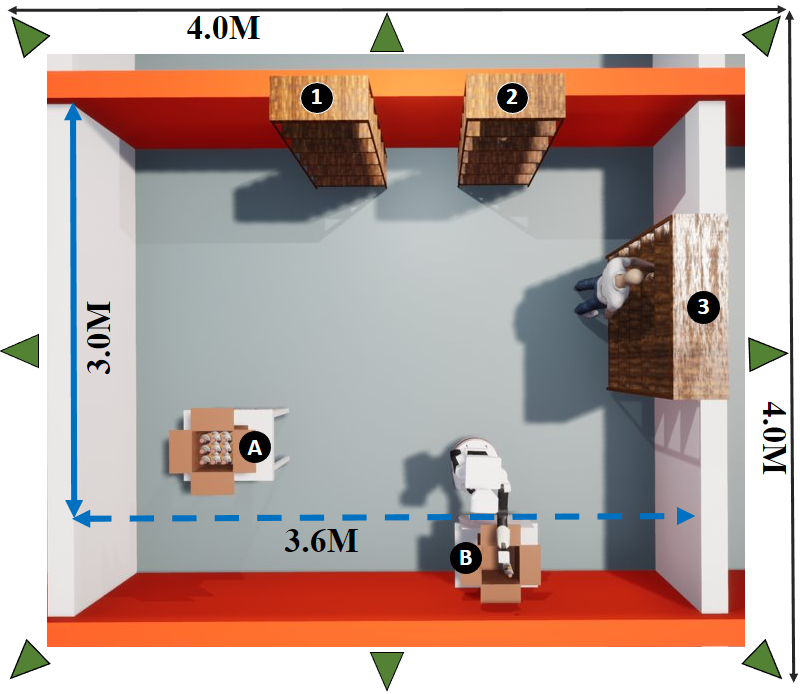
(i) integrates a digital replica of the environment to model the interactions between humans and robots, extrapolating intention cues from their implicit behavior, and
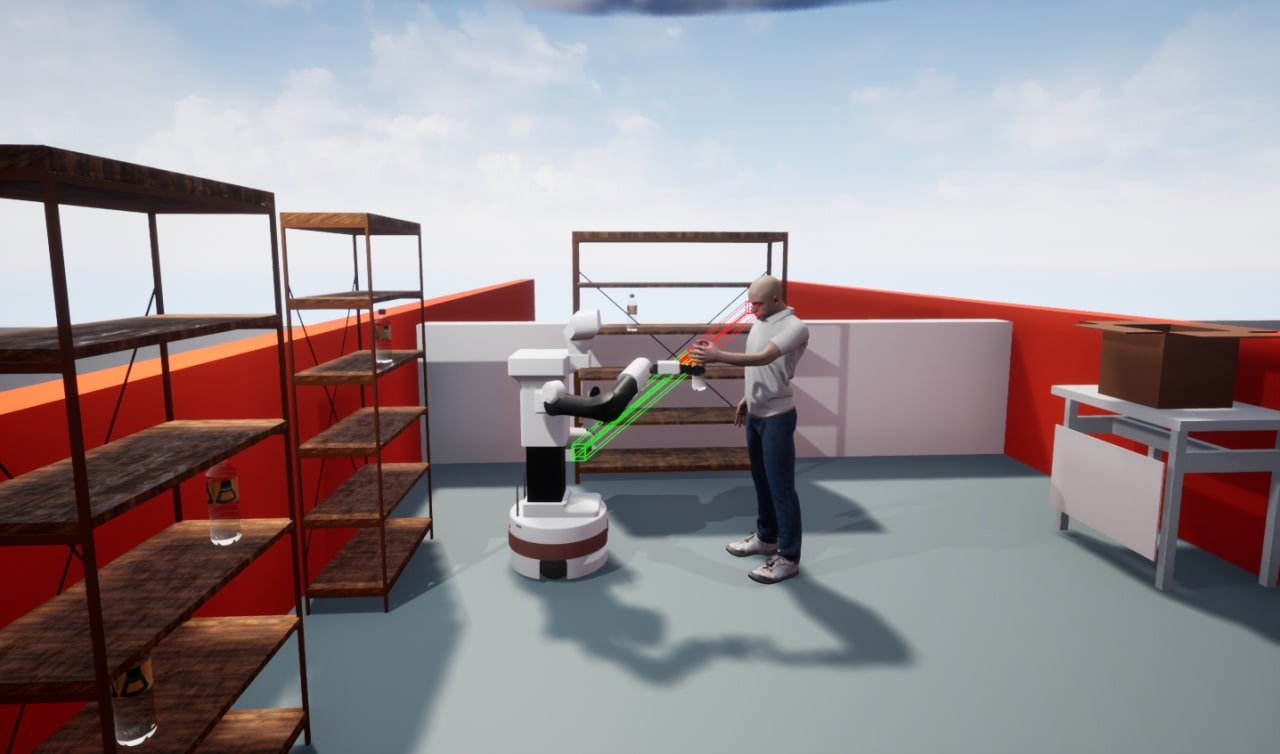
(ii) adopts mixed reality as a communication layer to convey the robot's intentions and upcoming actions to the humans who are interacting with it.
A user study involving 20 volunteers proved the effectiveness of the architecture in driving collaborative tasks, with a positive effect on task quality and human satisfaction.