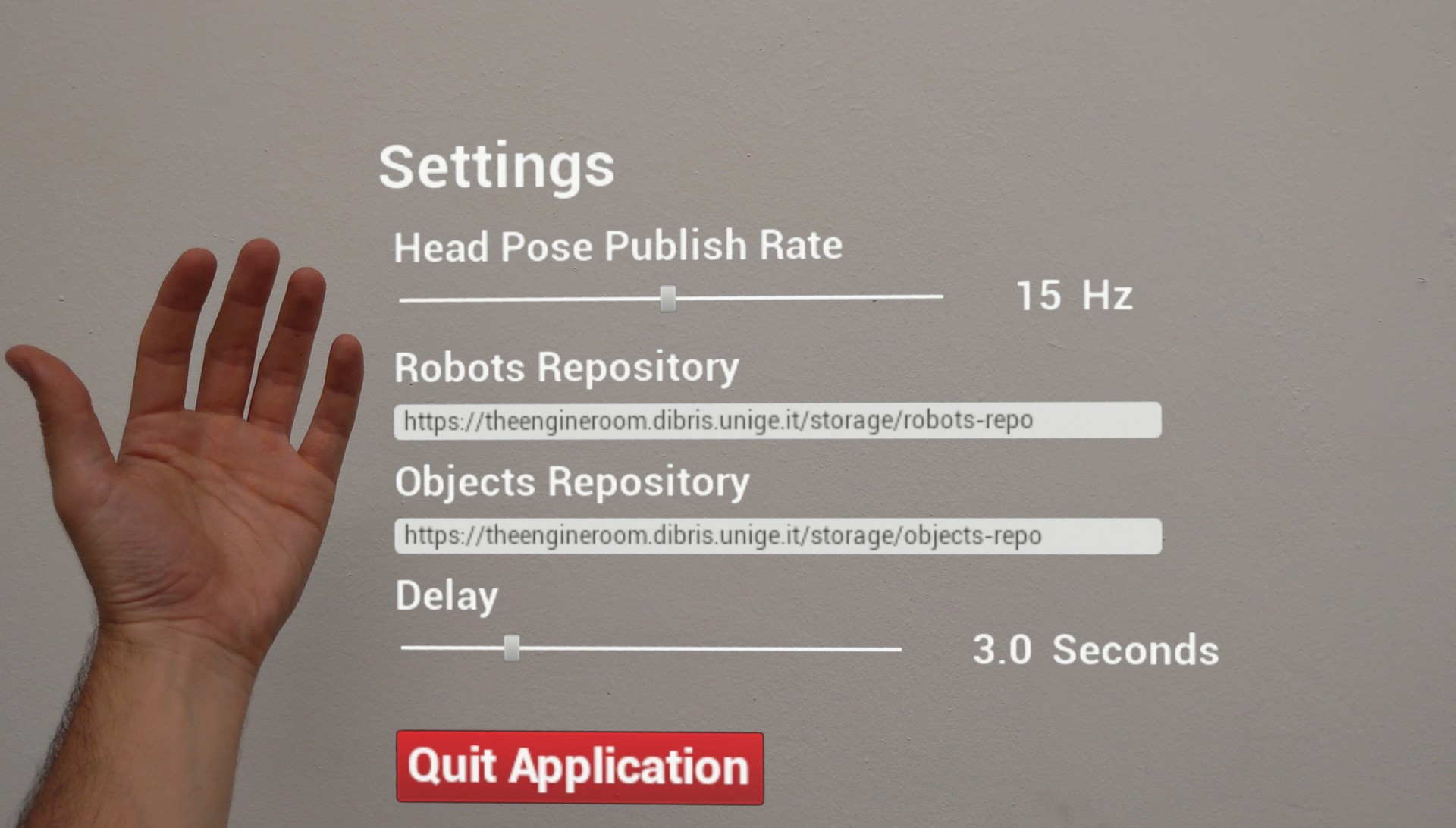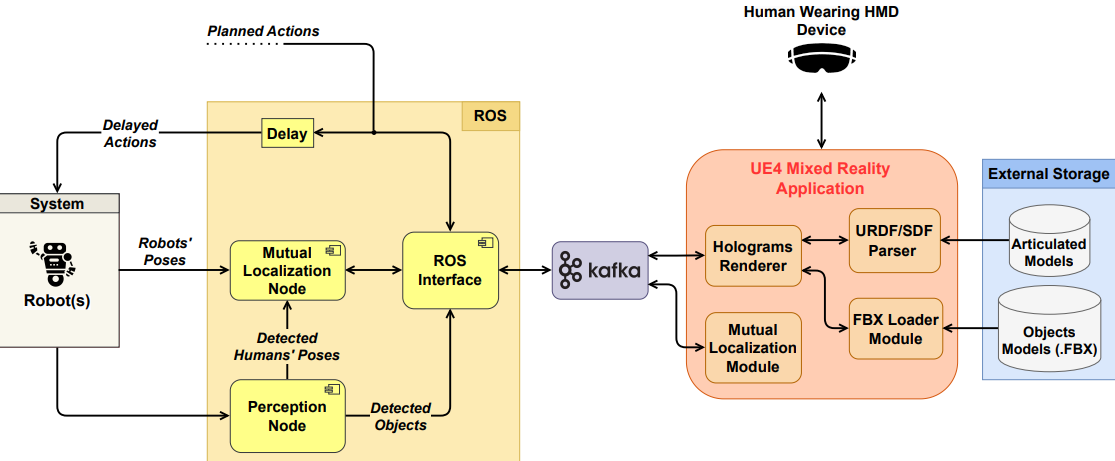
I have developed this modular digital twin for HRC based on Unreal Engine and opensourced. Multiple publications has been done based on it. This architecture provides a generic network interface ove kafka instead on ROS Networking backend and supports objects spawning, controlling and listning two from a cloud storage on-runtime without the need for rebuild. We have made a workshop in a conference based on this architecture and now its being utilized for Teleoperation, Intention communication, and kinesthetic teaching.